
叫車服務供應商Lyft釋出自家自駕車團隊所收集的Level 5資料集,供學術單位使用以發展自駕車技術,其中包含了超過55,000個由人類3D標記的影格、一個可駕駛的表面地圖(Drivable Surface Map),以及能為資料提供情境的高畫質度空間語意地圖(Spatial Semantic Map)。
Lyft的自駕車發展到了第三代,其Level 5的自駕車隊已經累積了數萬公里的行駛路程,而車上搭載的先進感測裝置,包括超高動態攝影機,能在行駛的過程收集清晰的道路資料,Lyft提到,高畫質製圖對於自駕車非常重要,他們在德國慕尼黑與美國帕羅奧圖,以車上的光達(Lidar)繪製了高品質的幾何地圖以及高畫質語意地圖,內含車道與人行道等資訊。資料集以nuScenes格式釋出,以確保能與現存的nuScenes技術發展相容。並使用自家團隊發展的技術,擴大幾何地圖的建置規模。
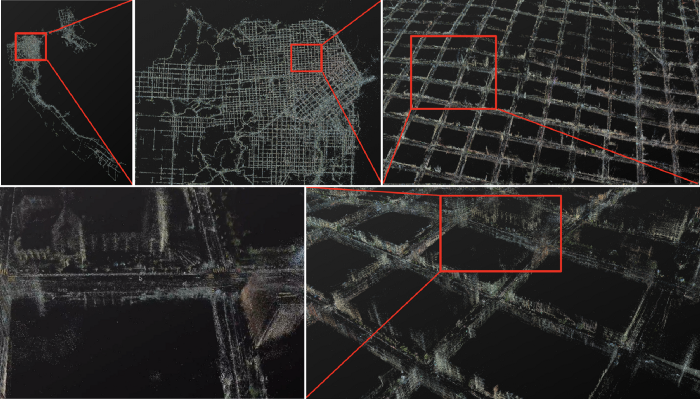
這次釋出的Level 5資料集影格,來自車上7個攝影鏡頭以及3臺光達。

Lyft提到,要取得能用於自駕車的訓練資料,除了要建置並調校感測器硬體外,還需要創建高解析度語意地圖等,如此才能繼續發展3D感測、預測或是路線規畫等進階功能。而Lyft在過去兩年,致力發展自駕車的硬體以及技術,並收集了一些資料,現在釋出以幫助有興趣的人員進行研究。
熱門新聞

2026-03-02

2026-03-02


2026-03-02

2026-03-02
2026-03-03

2026-03-02
2026-03-02
Advertisement