為了驗證自駕車的安全性,Waymo設計了一套碰撞避免測試(Collision Avoidance Testing,CAT),來評估Waymo自駕車在突發狀況反應與減輕碰撞的能力,而測試結果顯示,Waymo的碰撞避免能力優於NIEON。
NIEON是一個人類駕駛員的參照模型,設定上是一個細心、不會分心也不會疲勞的人類駕駛員,Waymo提到,因為人類司機時不時就會將視線從道路移開,因此NIEON模型其實代表了超越人類的效能水準,對Waymo自駕車提供比較的高基準。
由於司機在路上通常會遭遇突發狀況,不得不緊急煞車或是轉彎,以避免與其他用路人發生碰撞,像是闖紅燈或是突然變換車道的汽車等。而全自動系統需要在無人駕駛情況下,處理整個駕駛任務,因此自動駕駛的測試,要比輔助駕駛系統更加深入完整。
Waymo設計情境,結合虛擬、試車場和真實世界的駕駛測試,藉由使用所有駕駛資料、警察事故資料庫和行車記錄器中的撞車事故等碰撞資料,還有包括地理區域、駕駛條件和道路類型等營運資料,設計出測試場景。

Waymo從2016年以來,在場景資料庫儲存了數百萬英里的路駕資料,以及數千起真實世界的人類碰撞事故,足以涵蓋所有種類的危險情況。Waymo提到,無論開車地點為何,常見的事故類型都很相似,他們的資料庫可以作為任何城市的基準。
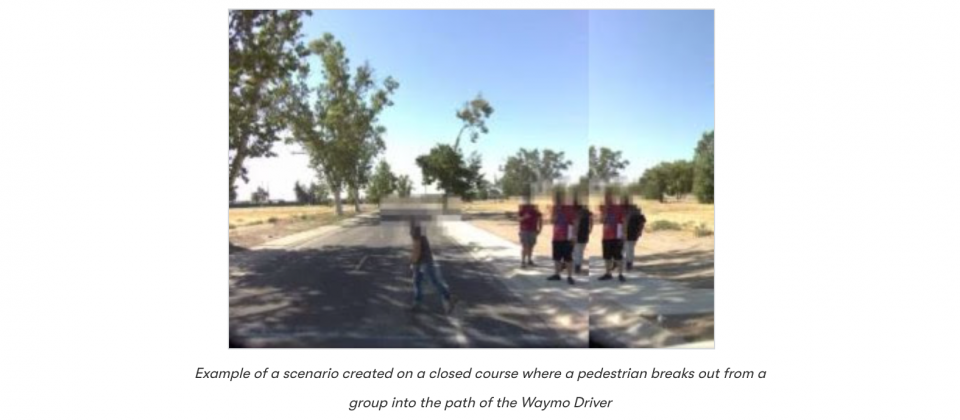
研究人員以數種方法創建情境,像是在封閉的測試道路上設計情境,透過紀錄發生的經過,以便在模擬中重現,而且也能夠修改場景中參與者的位置和速度,調整出更需要緊急迴避,以避免碰撞的場景,同樣地,在道路測試中發現的任何危險情況,都可以利用相同的過程進行模擬。
透過模擬,Waymo可以在數小時內,評估自動駕駛最新版本在數千種場景的反應,而不需要歷經數月甚至是數年的測試。而測試結果發現,Waymo自動駕駛在可能造成嚴重傷害的情況,比NIEON反應更好,Waymo自動駕駛更能夠避免車禍以及受傷風險。
熱門新聞

2026-02-11
</a> on <a href=\"https://unsplash.com/photos/blue-and-black-digital-wallpaper-uDO6NuH7WFU?utm_content=creditCopyText&utm_medium=referral&utm_source=unsplash\">Unsplash</a>")
2026-02-11

2026-02-12

2026-02-09

2026-02-10


2026-02-10

2026-02-06