
水利署第四河川局局長李友平在一場活動中分享,運用影像辨識技術結合Line Bot、無人機,來巡防河川周遭的違法行為,如傾倒垃圾、廢水或盜採砂石等。
圖/臺灣人工智慧學校提供
2016年,濁水溪被傾倒的圾垃就超過上百噸,為了解決河川被傾倒廢棄物、廢棄溶液以及盜採砂石等問題,負責濁水溪水域的水利署第四河川局局長李友平在臺灣人工智慧學校的團隊競賽中,提出了河川管理智慧監控解決方案,要將影像辨識結合監視器來自動巡防可疑車輛,並以無人機蒐證。李友平表示,目前正在進行產品化,未來除了要推廣到河川局,也希望進一步推廣到林務局、海巡署等巡山巡海的業務中。
李友平說明,濁水溪沿岸從上游到下游的越堤道路,長達200公里,本意是方便農民進入河川公地從事農作,卻成了不肖分子用來傾倒廢棄物、廢水、盜採砂石的通路。
為解決該問題,水利署原本就運用了傳統影像處理方法,利用越堤道路上布建的監視器畫面,上雲差異分析後並自動告警。其中的原理,是系統自動比對前後時間點的兩張畫面,若差異量達到一定程度,就會自動告警;接著,再由系統管理員判斷是否為違規事件,並通知分布在不同位置的河川巡防員去取締。
但是,這個做法有兩項缺點。李友平表示,一是影像差異比對的技術容易導致誤判,比如說,明明目標車種只有砂石車、怪手與垃圾車,但其他如機車、汽車、甚至動物經過也會告警,「所以系統管理員每天都很緊張,而且要浪費很多時間與人力來排解誤判問題。」第二,則是即便偵測到可疑車輛,也不一定抓的到,「因為河川巡防員不過20人,也不一定在目標車輛附近,常常到了目的地人就已經跑掉了。」
針對這些痛點,李友平的團隊提出了結合影像辨識、Line Bot與無人機的解決方案,要讓嫌疑車輛看得到,也抓得到。首先,在影像辨識的部分,團隊先定義出目標車種:砂石車、怪手與垃圾車,並從第四河川局的遠端監控系統中,截取5000張30萬畫素的影像來進行標記,再用YOLOv3框架來訓練出物件辨識模型。
李友平表示,由於5000張照片中,怪手的影像偏少,除了從網路公開圖庫加入怪手的照片進行訓練,也運用了資料擴增(Data Augmentation)的技術,將同一張怪手的照片分割成怪手手臂、履帶、駕駛座等部位,再來訓練模型,克服資料量不均的問題。另一個問題,則是因監視器只有30萬畫素,雖然辨識目標車輛無虞,但無法辨識出車牌或人臉,「所以我們要結合無人機來蒐證,一方面也持續從技術面尋找解決方法。」
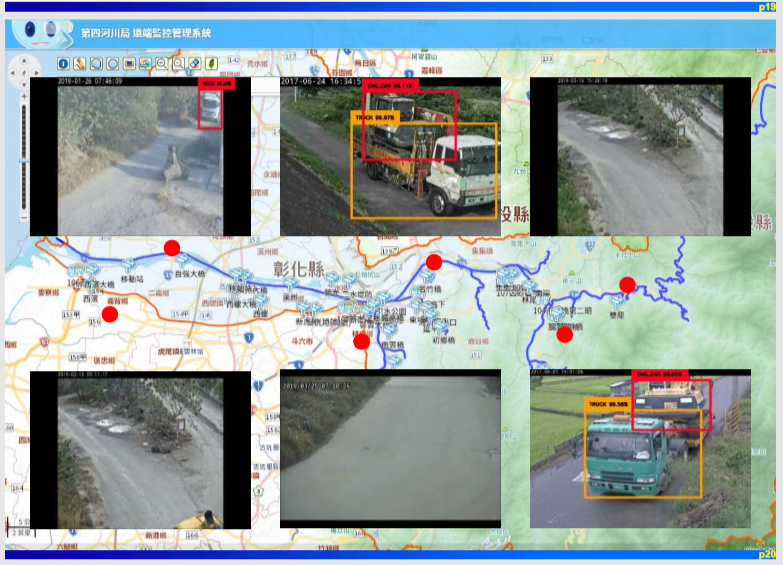
該模型初步布署在第四河川局的遠端監控管理系統中進行測試,辨識準確率可達98%。
訓練完模型也部署到遠端監控管理系統後,系統將自動於雲端辨識目標車輛,偵測到狀況時將自動截圖監視器影像,並透過Line Bot通知監管人員。接著,監管人員能直接回覆Line bot中的選項,決定是要指派距離最近的河川巡防員去取締、兩路包抄,還是要串聯無人機遠距錄影存證等。如此一來,不僅取締的效率提高,而且巡防員來不及抵達時,也能以無人機即時拍下目標車輛的車牌與違法行為。

監管人員透過Line Bot可以直接回覆預設的選項,比如指派距離最近的河川巡防員去取締、兩路包抄,或是出動無人機遠距錄影存證。
無人機也能應用在疏濬工區的探勘與取締。比如說,無人機結合攝影機與Lidar的深度感測技術,來拍攝疏濬前後的對照圖,並量測出地形起伏,藉此比對疏濬前後的差異、推算出疏濬量等。而且,定期、不定期出動無人機巡邏,也能對不肖分子產生恫嚇的作用。
未來,李友平還構想,要在每臺挖土機上配備GPS結合RTK基站,來精確定位挖土機位置,即時偵測到超出疏濬區(越界)的行為時,就能啟動無人機來蒐證;同理,若挖土機配備的GPS與攝影機,偵測到挖掘超過規定的深度(超深)的行為,無人機也能派上用場。不過,現行的挖土機均尚未配備上述的感測器。
目前,解決方案還在產品化的階段,還未能導入政府部門中,但在無人機的應用上,政府已經著手編列預算,要求每個河川局都要有專人去考取證照,以利後續政策的推動。李友平表示,等這套系統產品化且技術成熟後,也希望能逐步推廣到中央、地方政府的河川管理單位,以及辦理巡山業務的的林務局、水保局、觀光局國家公園,辦理巡海業務的海巡署、港務局,還有環保署中。
提到未來還需整合與研發的技術,李友平也說,會繼續開發車牌辨識技術,以及要在已核准的施工車輛加裝IoT感測器,使系統雖偵測到卻不會發出警報;另外,也要逐步汰換低畫質攝影機,並支援夜視功能,如星光夜視鏡及紅外線夜視鏡等。
熱門新聞

2026-03-06

2026-03-02

2026-03-02


2026-03-04

2026-03-05

2026-03-02

2026-03-02