Waymo
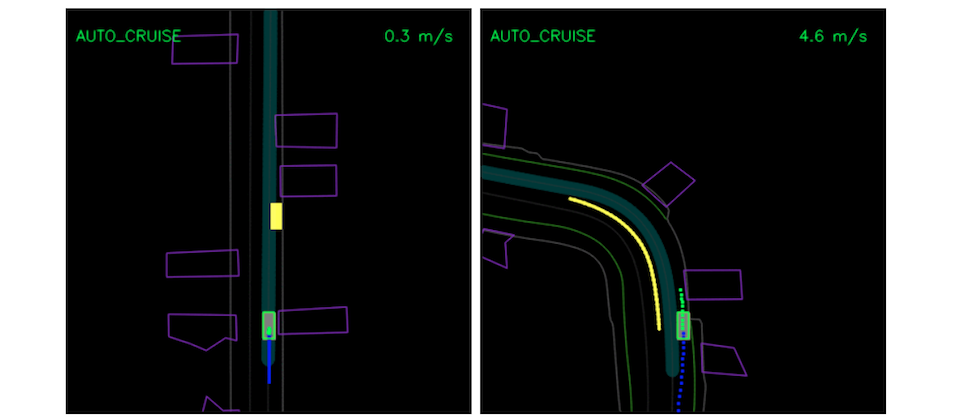
Alphabet旗下的自駕車子公司Waymo近日公開訓練自駕車的研究成果,透過大量的真人駕駛資料,建立神經網路模型,不只學習正常情況的駕駛資料,Waymo還合成其他狀況的資料,讓模型學習如何應對行車中的干擾,該模型不但能夠在充滿挑戰的模擬環境下正常駕駛,還能在封閉的真實環境中,駕駛真的車輛。
近幾年,許多研究用監督式深度神經網路,透過大量已標示的資料,來快速改善模型的準確率,尤其是物體感知和預測模型,而Waymo同樣地也使用了這個方法,透過真人駕駛示範的數百萬英里行車資料當成訓練資料,用監督式深度學習方法,不過,要訓練出像真人一樣的駕駛模型,光是模仿大量的真實行車資料還不夠,為了能讓模型更可靠,Waymo團隊還加入了額外的資訊,除了模擬好的行為之外,也要模擬不好的情況。
Waymo團隊建立了深度神經網路ChauffeurNet,讓模型向真人專家學習,該模型透過觀察中等程度的程式,來產生駕車軌跡,由於輸入的程式,不直接處理原始的感測器資料,因此能夠分解感知任務,研究團隊也能將真實和模擬資料整合,用於遷移學習。輸入模型的程式是個從上而下的場景環境資料,包含地圖、周遭物體、交通號誌、車輛運動等數據。
ChauffeurNet模型在寫下預測駕駛軌跡的點之後,會用該點作為下一個預測軌跡點的依據,不斷重複執行輸出駕駛軌跡,模型包含10個軌跡點,這些輸出結果會送到控制器中,轉換為控制命令,像是如何駕駛或加速。除此之外,Waymo研究團隊也應用一個獨立的感知深度學習網路PerceptionRNN,在駕駛移動的過程中,預測周圍移動物體。
ChauffeurNet模型內部分為兩個網路,卷積網路FeatureNet和AgentRNN,FeatureNet從輸入的資料中計算一系列的特徵,再由AgentRNN負責收集FeatureNet過去呈現的影像,模型再輸出預測結果,這些預測結果被用來更新AgentRNN的輸入資料,為下一次的預測做準備。
圖片來源:Waymo
訓練模型的部分,Waymo用大約60天的駕駛資料來訓練模型,還加入past motion dropout技術,來確保模型不會一直只根據過去的運動推斷,並且對環境產生正確相對應行動,如此一來,模型能夠學習適當地應對交通狀況,像是遇到交通號誌會做出正確的判斷,但是,即便用大量的資料訓練模型,還是會有模型沒有遇過的狀況。
訓練資料通常只有包括在好的情況下駕駛範例,為了訓練自駕模型面對的不好的情況能力,Waymo研究團隊加入擾亂駕駛行車軌跡,起點和終點不變,但是軌跡產生偏差,來教導模型如何從擾亂的情況中恢復,另外,Waymo也合成了與道路邊緣或是物體碰撞的資料,利用合成資料和附註的獎勵機制,讓模型學會如何應對不好的情況,舉例來說,經過訓練的模型能夠繞過停在路邊的車輛,回到正常的行車軌道繼續行駛。
不過,要打造全自動的自駕系統,必須解決真實世界中長尾效應的問題,深度學習模型在缺乏資料的場景中,還是存在許多問題,深度學習模型能夠辨識與訓練資料相關性,但是無法透過觀察相關性來建立因果模型,也不能主動測試虛擬條件下的情況,要建立因果模型必須知道真人駕駛行為的原因,以及面對特定狀況會如何反應,了解原因才能讓自駕車模型變得更安全。
現在Waymo自駕車使用的行車規畫模型是結合了機器學習和明確的推論系統,持續評估各種不同場景的可能性,來做出最佳的駕駛決策,該模型已經過1,000萬英里的道路測試,和數十億英里的模擬測試,Waymo表示,現在的模型離全機器學習模型還很遠,目前Waymo還持續在研究因果模型的難題。
熱門新聞

2026-02-06
2026-02-06
2026-02-06

2026-02-06
2026-02-09
")
2026-02-09

")