
工研院機械所數位長王傑智臉書
最近有個第一人稱視角拍攝的自駕車影片在網路爆紅,一輛工研院國產自駕車在交通繁忙新竹市區及大街小巷中行駛,片中不時可見凌亂的紅綠燈位置、違停併排車輛、人車爭道,還有從小巷竄出的機車、走在車道上的路人,這是國外看不到的複雜交通景象,是臺灣獨有的交通特色。但面對這些挑戰,這輛自駕車依然在沒有人為介入的情況下跑完全程,「你可以請Waymo自駕車到新竹來試開看看。」工研院機械所數位長王傑智自豪地說。
影片中的自駕車行駛路線,正是這次新竹物流自駕物流實驗路線。為了具備有這樣的市區自駕能力,王傑智和工研院機械所自駕車團隊花了3年多,持續在臺灣各種道路上磨練精進車輛自駕技術,才讓片中的自駕車練就一身開車技術的好本領。
除了送貨自駕貨車,王傑智和自駕車團隊目前正在打造一套自駕系統,可供35噸重的大型聯結車做自駕使用,這輛自駕聯結車不論重量或身型都比一般貨車高大許多,對於這項新挑戰,王傑智只簡單回答: 「做就對了。」

除了測試自駕貨車,工研院機械所自駕車團隊目前正在打造一套自駕系統,可供35噸重的大型聯結車做自駕使用,這輛自駕聯結車不論是重量或體型都比一般貨車大上許多。圖片來源/工研院機械所數位長王傑智臉書
身為臺灣國產自駕系統研發重要核心人物,王傑智長久以來主打的訴求,就是不論任何車型都能改裝成自駕車,從小貨車、轎車、休旅車,到大卡車、傳統柴油巴士都難不倒他。他經手的自駕車數量,從一開始只有3輛車,到現在發展10多輛自駕車,每部自駕車的改造及其搭載的國產自駕決策系統,全都由工研院機械所自駕車團隊一手包辦。
為了讓自駕車能夠適應各種路況,測試團隊不只在封閉場域做訓練,更把握各種實證場域不斷練兵來精進自駕車技術,迄今已經能夠做到特定開放場域全自駕。像是他們研發的自駕車在新竹南寮漁港的路上,已經足足開了兩年,不分天候、時段鍛鍊提升國產自駕系統能力,後來更將這套自駕系統,裝進一輛柴油巴士改裝的自駕大巴,行駛在臺中水湳的開放道路上,學習應對混合車流的情境。這些年來,累積自駕里程超過六千公里。
如果將90-90法則套用到自駕車發展上,也就是IT界或軟體圈常聽到的「90%程式要花費團隊90%的開發時間,剩下10%要再花費相同時間來開發」,王傑智自評,工研院機械所自駕車團隊現在不只從0分到90分,還從90分進步到91分,「雖然只是增加1分,這已經相當厲害,代表持續進步。」他這樣說。
.jpg)
工研院機械所數位長王傑智表示,如果將90-90法則套用到自駕車發展上,工研院機械所自駕車團隊現在不只從0分到90分,還從90分進步到91分,雖然只是增加1分,這已經相當厲害,代表持續進步。攝影/蘇文彬
在接下來一年當中,工研院機械所自駕車團隊將以2輛克萊斯勒Pacifica改裝的自駕物流車和一輛5噸重的堅達自駕貨車,在全長約1.9公里市區道路上,配送貨物往返新竹物流兩個營業所。雖然是行駛固定路線,但自駕地點不僅緊鄰火車站,距離竹科也不到5公里遠, 測試時段不只安排了上下午, 還有半夜凌晨時段,這也意味著,會遭遇到上、下班人車潮的考驗。
不過,王傑智一點也不擔心,對於他們的自駕車很有信心,甚至他很早就開始布局,透過各種方式,讓這套自駕決策系統逐步適應臺灣本土的交通特色與駕駛行為。
克服背景複雜的紅綠燈辨識有一套
紅綠燈就是其中一個例子。紅綠燈辨識一直是自駕車上路的挑戰,在臺灣更是如此,需要克服各種複雜背景下的紅綠燈、夜間號誌辨識的考驗,但工研院機械所自駕車遇到紅綠燈時,卻一點也沒有這個問題,不論紅綠燈擺放位置遠近、數量多寡,周圍背景有多複雜,也不分白天或夜間,都能夠處理得宜。
王傑智解釋,最主要的原因是,團隊不只用了一套紅綠燈辨識技術,而是採用複合方式來確保交通號誌判別正確性。例如在紅綠燈辨識系統上,底層雖採用深度學習技術,但自駕車決策時還會搭配高精地圖來看,從拍攝照片比對車上相機位置和每個紅綠燈的幾何關係,來推算出紅綠燈在照片上的相對位置,來縮小檢測範圍,甚至還會結合時間訊息,只要加入基本邏輯判斷,自駕車就能知道其他角度的號誌應該亮紅燈或綠燈,現在可以左轉或右轉。「我們光是紅綠燈辨識就有很多層」,他說,針對紅綠燈辨識,除了有強化深度學習分析模型,還會將所有可用的空間幾何、時間的訊息放進來,加強整個系統的穩定度和正確性。
不只應付靜態的交通,工研院機械所自駕車的厲害之處,在於遇到各種動態的交通狀況也能迅速反應。以臺灣道路上常見的「多事件同時發生」的情況為例,王傑智表示,當自駕車遇到這種情況時,可以慢下來等待,也可以選擇繞開,這時候,自駕決策系統根據感知系統偵測和追蹤到多個事件時,就會從可能影響的行駛路徑中,找出所有可能的解決方式,再從這些解法中,挑出一個最安全且合理的方法來執行,讓自駕車避開這些事件。
他強調,最重要的是,要能迅速找到一個安全解法,而且是附近的人都可接受的合理方式。這不是一件容易的事,需要靠融合傳統和新式作法,反覆提高自駕系統的決策能力,才有辦法做到。
甚至遇到開車爭道,誰該禮讓誰的問題,自駕車團隊也有設計一套處置方式,來傳達出自駕車要卡位或讓位的訊息,例如緩慢一步步逼進,讓對方知道你的車要先過,或是知道安全情況下表現毫不畏懼快速通過,就像當地人自己在開車那樣。為了設計出能夠貼近在地化的開車行為,他們會將一些原本人類駕駛習慣的行為轉換為規則,放進自駕決策系統中,也有結合行為樹(Behavior Tree)決策,根據每個地方路況需求調整參數,進而讓自駕車表現更在地化,「到目前為止,我們自駕車只要表現兇一點,對方就會禮讓」他滿意的說。在他眼中,這套國產自駕車系統越來越像是一位道地的臺灣人。
高精地圖也要在地化,幫助自駕車避開三寶雷區
不只讀懂臺灣駕駛習慣,自駕車團隊也會透過車上裝的高精地圖,來讓自駕車可以避開一些開車雷區,比如三寶區,常有行人穿越馬路或出現違停車,工程師就會將這些資訊標示於高精地圖上,車輛行經時會主動加強對這個區域的人車進行追蹤,來確保行駛安全。
在規畫路徑時,自駕車也會根據地圖上需要留意的資訊,安排較少人穿越的道路來開,甚至還沒開到違停路段前,自駕車自己會先預設前方車道可能有違停車,於是選擇改走內側車道,而不走外側道。「這在一般高精地圖上看不到,可是車開久了,人類駕駛會知道當地人習性,將這些在地化資訊考慮進來,自駕車開起來才會更順。」他表示。
正因為自駕車每到一個新場地練習時,工研院機械所自駕車團隊第一件事,就是建置高精地圖,這些年來,自駕車團隊發展出一套低成本且快速建置的作法,像是建立點雲地圖時,有結合不少演算法和自動化工具,來縮短地圖繪製所需的人力和時間,還利用AI等各種自動化工具標記語意地圖上的輔助資訊,如開車規則、紅綠燈位置,然後以人工進行確認,也會結合其他工具修正錯誤,提高地圖精度。
王傑智表示,這樣做的好處是,不只能更快建好地圖,而且成本相對低廉,跟一臺動輒1~2千萬元的高精密測量儀器設備相比,自駕車團隊只用十分之一價格的設備,就能繪製出相同高品質的地圖,同樣可提供公分等級的精度。
將虛擬的動態交通狀況疊加到真實道路,測試自駕車決策系統的臨場反應
當自駕車遇到一些從沒看過或罕見的路況時,測試團隊也會結合虛實混合技術,來加強這方面的訓練,除了在虛擬世界產生類似交通情境來加以驗證,還會將這些虛擬的動態交通狀況放進實體環境中來測試,如同透過手機螢幕看到眼前的虛擬寶可夢出現, 他們也把這些虛擬狀況疊加到真實道路上,用來測試實體自駕車的臨場反應,能否做出對應的處置。在這次物流自駕實驗中,自駕車團隊就有使用自駕車數位分身,在新竹市道路的數位分身中來進行自駕車行為決策的驗證。
不過,王傑智也表示,在模擬環境訓練完的自駕車數位分身,要使用在真實環境的自駕車上,需考慮到虛擬與真實世界的差距,尤其,想要模擬出一個高擬真的感知系統,目前仍十分困難。這也是為何他們建立自駕車數位分身時,先以自駕決策系統的數位分身來驗證,而沒有使用感知系統的數位分身。
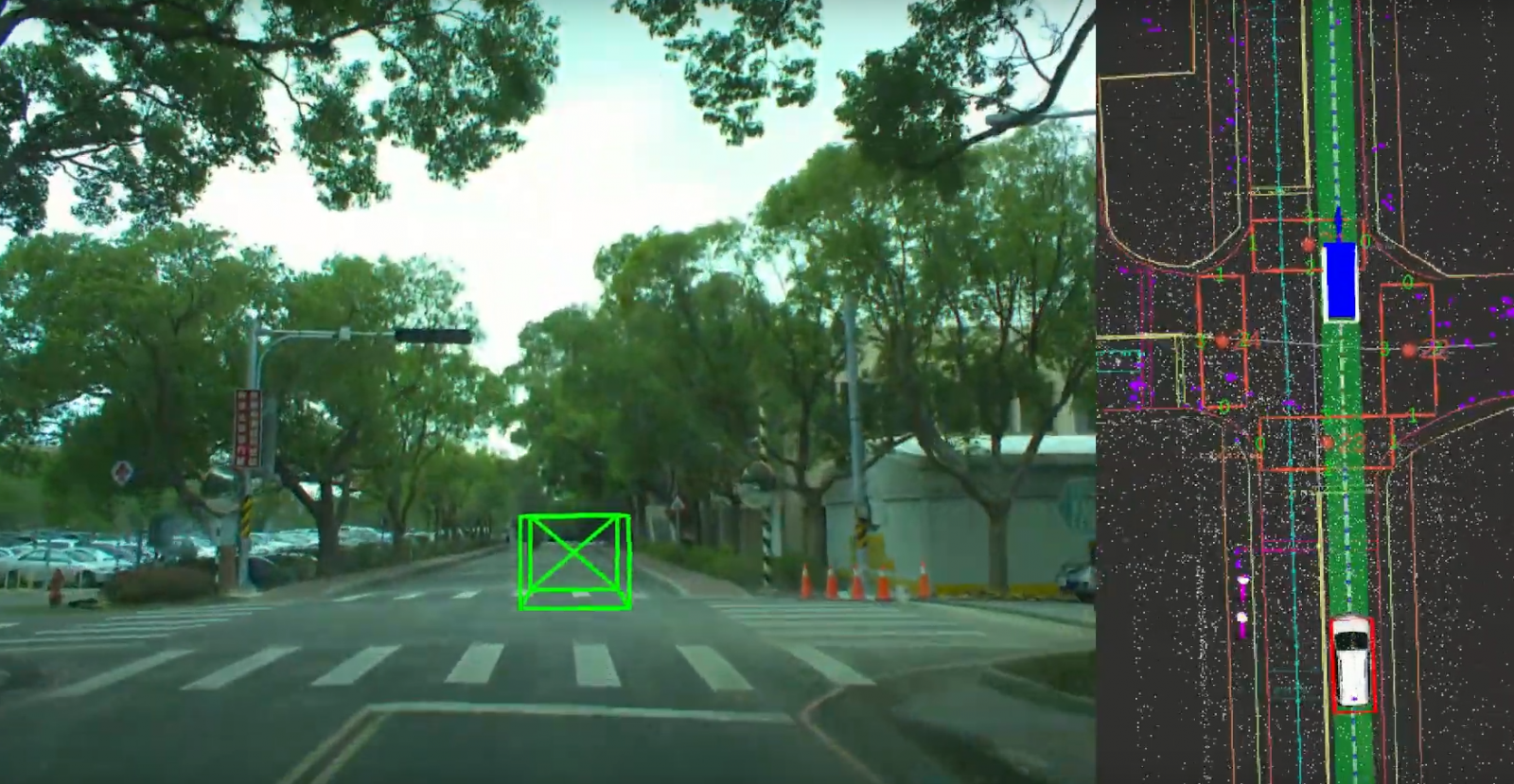
除了在虛擬世界產生各種交通路況來驗證自駕決策系統,工研院機械所自駕車團隊還會把這些虛擬狀況疊加到真實道路上,來測試實體自駕車的反應,看能否做出跟自駕決策系統數位分身相同的處置。(圖片來源/工研院機械所數位長王傑智部落格)
3年多來全心投入專研自駕車技術,儘管已經和自駕車團隊打造出了10多臺國產自駕車,王傑智認為還有努力的空間,跟自己原先預期的數百臺仍有差距,即使如此,他仍持審慎樂觀的態度,「雖然這件事不容易成,我還是會努力來達成」他堅定的說。
熱門新聞

2026-02-09

2026-02-11

2026-02-10

2026-02-06

2026-02-10
</a> on <a href=\"https://unsplash.com/photos/blue-and-black-digital-wallpaper-uDO6NuH7WFU?utm_content=creditCopyText&utm_medium=referral&utm_source=unsplash\">Unsplash</a>")
2026-02-11

2026-02-10

2026-02-10