

| google | 機器人 | 深度預測 | 非監督式學習
非監督式學習如何對移動物體進行深度預測?Google找到新方法解決
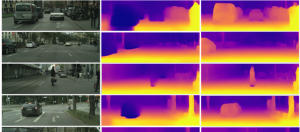
準確預測機器人與物體的距離,是自動導航、迴避障礙物,安全規畫等能力的關鍵,Google研究團隊提出一項創新的作法,來產生移動物體的深度評估結果,Google也將這次的研究透過TensorFlow在GitHub中開源釋出。
2018-11-29

OpenAI結合非監督式、監督式機器學習方法,大幅提升AI文字理解與推測能力
OpenAI提到,當有足夠龐大的訓練資料時,非監督式學習可以產生卓越的區別性特徵。雖然在不少應用的結果仍不敵純粹的監督式學習,但是不失為另一個研究方向。
2018-06-13