Google AI團隊透過自動強化學習技術,打造具有遠距導航功能的服務型機器人,未來可望能協助行動不便者購買生活用品或領包裹
2019-03-04
Google超快深度增強學習演算法Soft Actor-Critic,機器人只要訓練2小時就能於各類地形行走
Soft Actor-Critic基於最大熵增強學習,增加了超參數的強健性以及採樣效率,可以在幾小時內解決原本需要數週的機器人行為訓練。
2019-01-21




不需人為標記資料,Google讓機器人從抓取物體的過程中自己學會辨識物體
Google為機器人發展出來的Grasp2Vec演算法,概念簡單來說,要辨識的物體就是機器人抓取物體本身,其應等於抓取前場景的圖減去抓取後場景的圖。
2018-12-12
| google | 機器人 | 深度預測 | 非監督式學習
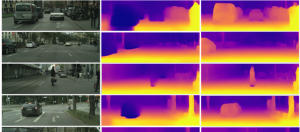
非監督式學習如何對移動物體進行深度預測?Google找到新方法解決
準確預測機器人與物體的距離,是自動導航、迴避障礙物,安全規畫等能力的關鍵,Google研究團隊提出一項創新的作法,來產生移動物體的深度評估結果,Google也將這次的研究透過TensorFlow在GitHub中開源釋出。
2018-11-29

開發流程化繁為簡,AWS推出方便測試及部署的機器人應用服務RoboMaker
開發機器人應用需要花費長時間在開發、測試和部署工作上,為了加速開發過程,AWS最近推出一項方便開發人員開發、測試和部署機器人應用的服務RoboMaker,提供一系列工具讓開發人員建置機器人更輕鬆
2018-11-27

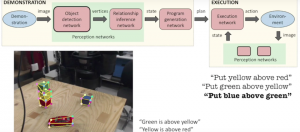
Google讓機器人抓握技巧更像人,在雜亂中抓取目標前還會先撈一撈
Google要讓機器人模仿人類的抓握策略,不只使用深度學習,賦予機器人處理非結構化現實場景的能力,再結合增強學習,讓機器人擁有進行長期推理與強大的順序決策技巧。
2018-07-02